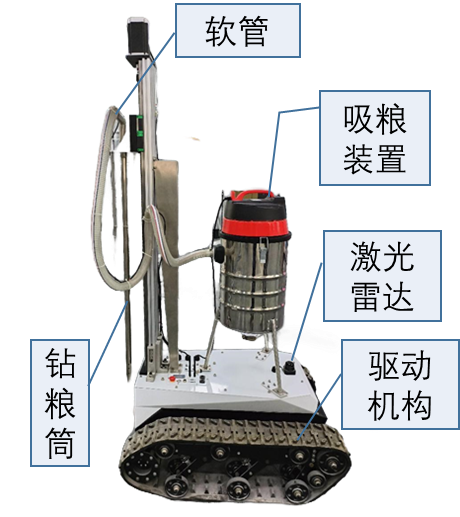
粮食自主扦样机器人
1.功能简介
粮食自主扦样机器人用于解决现有的扦样机不能在粮仓内粮面进行自主扦样的技术问题;该机器人包括机器人本体,机器人本体两侧对称设有履带以及设有通过软管连接吸粮装置和取粮装置。该机器人不仅能随机选择扦样点进行扦样,而且能在粮仓内的粮面上构建地图、规划路径进行自主扦样;还可以在粮仓内粮面上进行自主扦样操作,方便对粮仓粮情地检测,结构简单,功率小,操作方便、灵活。
2.性能参数
CPU:Intel@Core™ i5-4200U 1.6GHZ
测量范围:10%-40%
最大测量距离:40m
粮食取样器:最大吸力:35M;取样管尺寸130cm
3.核心技术
机器人多扦样点自主扦样技术;
动态环境地图构建与路径规划技术;
粮面自主运动技术。
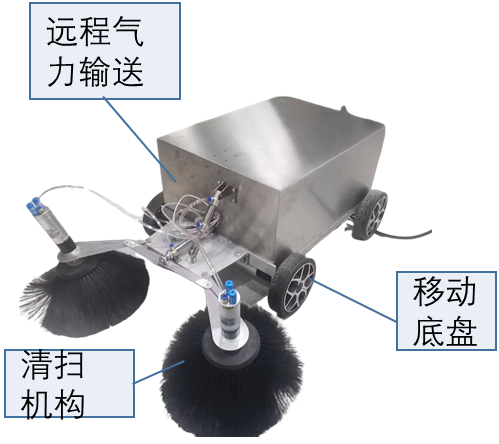
智能余粮清理机器人
1.功能简介
智能余粮清理机器人由移动底盘、清扫机构、远程气力输送机构构成,具有移动功能、余粮清理功能和余粮远程输送功能。采用压缩空气作为该机器人的动力源,有效降低了在余粮清理作业过程中产生粉尘爆炸的风险,提高了机器人的安全性。
2.性能参数
机器人运行速度:最大5m/s
整机尺寸:L*W*H:930*500*400mm
质量:55kg
电池容量:24V20AH
控制方式:高端arm微处理器手动开启与关闭电源,无线遥控操纵
续航:10h
材质:铝合金、不锈钢、pu塑料等
3.核心技术
气力驱动技术;
大仓环境下小目标余粮识别技术;
余粮清理机器人高效作业协同控制技术。
平粮机器人
1.功能简介
平粮机器人包括机身、平粮机构和驱动机构,驱动机构包括设置于机身底部两侧的螺旋推进杆,螺旋推进杆具有固定轴和螺旋叶片螺旋叶片固定轴上设置有用于随着螺旋叶片固定轴的旋转搅动粮食的挡板。平粮机构设置在机身后端,实现行走过程中平整粮食。
2.性能参数
电源适配器:AC220V转 DC24V10A
整机尺寸/质量:L*W*H:765*350*274mm/50kg
电池容量:25.2V20AH
控制方式:高端amm微处理器,手动开启与关闭电源,无线遥控控制动作
3.核心技术
复杂环境下自主识别技术;
复杂环境地图构建与路径规划技术;
粮面自主运动技术。

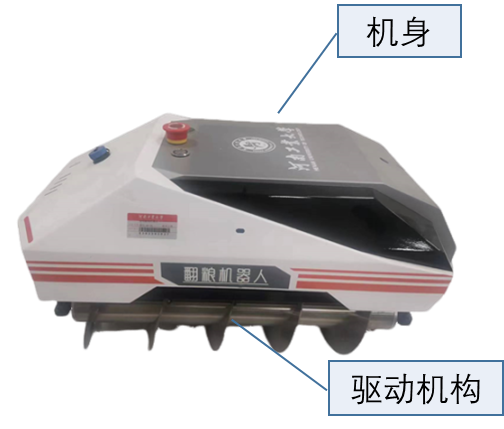
翻粮机器人
1.功能简介
翻粮机器人包括机身、翻粮机构和驱动机构,驱动机构包括设置于机身底部两侧的螺旋推进杆,螺旋推进杆具有固定轴和螺旋叶片螺旋叶片固定轴上设置有用于随着螺旋叶片固定轴的旋转搅动粮食的挡板。
2.性能参数
电源适配器:AC220V转 DC24V10A
整机尺寸/质量:L*W*H:765*350*274mm/50kg
电池容量:25.2V20AH
控制方式:高端amm微处理器,手动开启与关闭电源,无线遥控控制动作
3.核心技术
复杂环境下自主识别技术;
复杂环境地图构建与路径规划技术;
粮面自主运动技术。
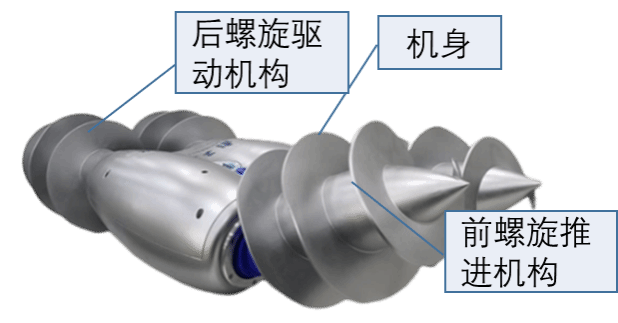
粮内巡检机器人
1.功能简介
粮内巡检机器人包括机身,机身的前端设置有前螺旋推进机构,并设置用于驱动前螺旋推进机构的驱动单元,前螺旋推进机构与驱动机构之间通过万和节传动连接,机身和前螺旋推进机构之间设置有用于驱动前螺旋推进机构摆动的摆动单元。该机器人通过前螺旋推进机构和摆动单元的配合,可以活动至粮堆内的任何位置,从而便于对粮堆内的粮食进行检测。
2.性能参数
电源适配器:AC220V 转 DC24V10A
额定转速:220转/分钟
整机尺寸/质量:L*W*H:999*416*216(260)mm,11kg
电池容量:25.2V20AH
控制方式:高端arm微处理器
控制界面显示:直行/平移/下潜/上升;电量显示/低电量报警等
材质:铝合金、不锈钢、ABS、铜等
3.核心技术
粮仓环境多传感器监测技术;
粮堆环境中自主移动技术。
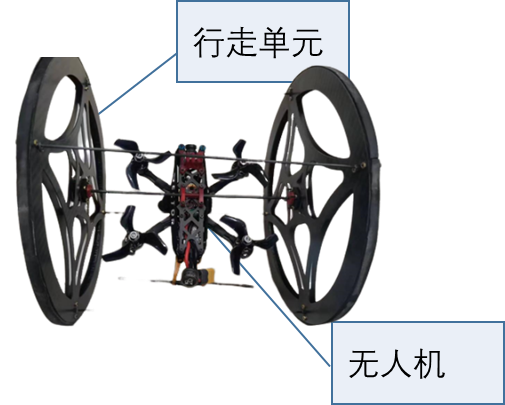
粮面巡检无人机
1.功能简介
粮面巡检无人机包括行走单元,其行走单元包括中心撑杆和设置于中心撑杆两端的行走轮,两个行走轮之间的周向上还设置有至少两个周向撑杆,周向撑杆与行走轮围合形成用于对无人机进行保护的保护空间。通过在两个行走轮的周向上的周向撑杆连接行走轮,避免了卡滞在粮面的风险,确保行走轮滚动的稳定性,避免行走单元的异常磨损;围合形成的保护空间,使得无人机在保护空间内作业降低了直接与粮面异常接触的机率,提高无人机作业的安全性。
2.性能参数
最大上升速度:8m/s
最大水平飞行速度:35m/s
最大飞行海拔高度:5000m
续航时间:8~12min
续航里程:≤4Km
3.核心技术
粮仓中复杂环境精准定位系统;
多干扰下自主导航与避障技术;
小型化轻量化设计。
粮仓巡检机器人
1.功能简介
粮仓巡检机器人主要应用于粮仓控制室,检测设备运行状况。该机器人包含有四个摄像头,可以实现360度无死角,可以在不间断、高效率的情况下执行巡检任务,不受疲劳和人力限制。这可以帮助粮仓管理更好地管理资源,将人员从繁琐的巡检任务中解放出来从而能够更专注于其他关键任务。
2.性能参数
机器人最大速度:1m/s;1rad/s
续航:10h
质量:70kg
电池容量:24V20AH
3.核心技术
自主导航定位技术;
数据实时处理技术。

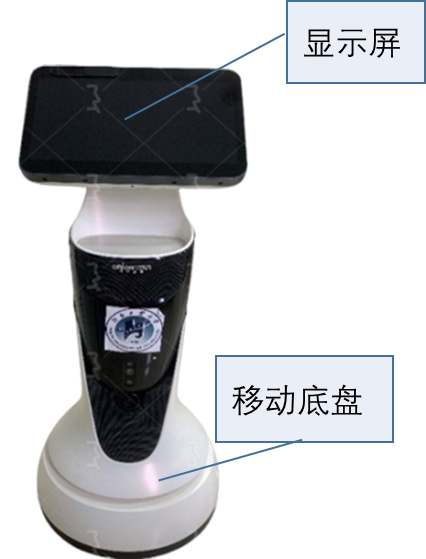
服务机器人
1.功能简介
服务机器人的感知由多目立体视觉、全向听觉和测距等全方位的感知系统组成,并且结合了机器人技术、人工智能、传感器技术等众多领域的技术,可以在各种场景下进行智能操作和交互,从而提供更好的服务和支持。
2.性能参数
续航能力:≤6h
显示屏尺寸:14寸
行走速度:0-1.2m/s
定位精度:±50mm
电动机:伺服电机
立体声麦克风:1套
3.核心技术
图像识别技术;
导航定位技术;
人机交互技术。